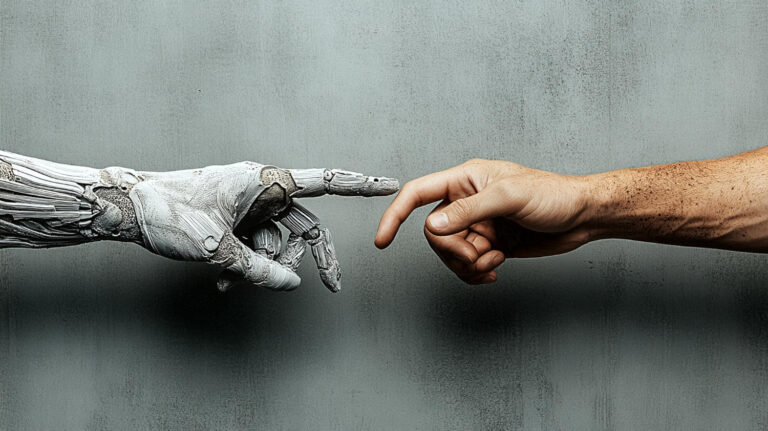
Како шеф на AI роботиката на Alphabet, верував во многу работи. Роботите не можат да дојдат доволно брзо и тие не треба да личат на нас – Енди Рубин.
Во јануари 2016 година, Енди Рубин се приклучи на Google X, со задача да ја одреди иднината на деветте компании за роботи кои ги купи Google. Конфузијата следеше по неговото нагло заминување од компанијата. Потоа, појавувањето на визијата на Астро Телер за Google X како единствена лабораторија за иновации со амбициозни цели ја направи оваа можност доста привлечна.
По години на градење влијателни компании, потенцијалот за роботи со вештачка интелигенција изгледаше како следиот храбар потег и предизвик за Google.
Осум и пол години подоцна, и покрај тоа што Google ја стопираше својата најголема инвестиција во роботиката, стартапите во оваа област продолжуваат да се појавуваат. Сепак, останува загриженоста дека фокусот на Силиконската долина на брзо враќање и неподготвеноста да инвестира во хардвер може да го попречат напредокот во создавањето роботи управувани со вештачка интелигенција.

Кое е значењето на Moonshot?
Google X е основан во 2010 година со мисија да се справи со најтешките проблеми во светот. Сместен подалеку од главниот кампус на Google за да го поттикне независното размислување, X поттикна смели ризици, брзо експериментирање, па дури и го прослави неуспехот како знак на висока цел. До моментот кога се приклучија новите членови, X веќе започна со проекти како Waymo, Google Glass и други иновативни идеи.
Она што го издвои X од стартапите од Силиконската долина беше неговиот фокус на долгорочно, амбициозно размислување. За да се квалификува како „Moonshot“, потребен е проект кој што ќе реши голем проблем, ќе искористи пробивна технологија и да се предложи радикално, речиси лудо решение.
Кои се предизвиците за роботите да функционираат во иста средина со луѓето?

Астро Телер, соодветно наречен „Captain of Moonshots“, беше совршниот лидер за X. Кога тој и тимот првпат разговараа за иднината на набавките на роботи на Google, знаеја дека им треба нов пристап.
Во тоа време, роботите беа големи, опасни и ограничени на индустриски простори. Целта стана јасна: Да се создадат автономни роботи кои ќе бидат безбедни и корисни во секојдневниот живот, справувајќи се со глобалните предизвици како што се стареењето на населението и недостигот на работна сила.
Вештачката интелигенција би била технологијата за пробив, а за решението би биле потребни години, милијарди долари и многу неуспеси. Тимот во X веруваше дека се на работ да ја претворат научната фантастика во реалност со тоа што ќе ѝ дадат на вештачката интелигенција тело во физичкиот свет.
Со децении, роботите се мачеа да извршуваат дури и едноставни задачи, како што се подигнување на чаша или отворање врата, бидејќи реалниот свет е непредвидлив. Малите промени, како на пример варијациите на осветлувањето, предизвикуваат неуспех на овие програми. Покомплексните задачи, како што е навигацијата и движењето во преполни простори, се уште потешки.
Освен ако сè не е строго контролирано – предмети на фиксни места и постојано осветлување – дури и основните дејства, како ставање на јаболко во сад, стануваат неверојатно тешки. Ова е причината зошто фабричките роботи работат во предвидливи поставки, ослободени од сложеноста на интеракцијата со луѓето.

Главен предизвик: Како да се научат роботите да учат
Постојат два главни пристапи за примена на вештачката интелигенција во роботиката. Првиот е хибриден пристап, каде што вештачката интелигенција напојува одредени делови, како што е препознавање на објекти, додека традиционалното програмирање се справува со дејства. На пример, вештачката интелигенција детектира јаболко, а софтверот на роботот го зема со помош на претходно поставени правила.
Второто, учење од крај до крај (end-to-end), ги учи роботите да учат задачи како „подигање предмет“ преку многу потрошено време на тренирање на одредениот модел, слично на тоа како детето учи преку вежбање. Покажувањето дека роботите можат автономно да ги извршуваат овие задачи е клучно за справување со непредвидливоста во реалниот свет.
Иако изградбата на физичкиот робот останува важна, успешното постигнување на задачите на e2e се смета за вистински пробив, правејќи ги другите технички аспекти да се чувствуваат споредни.
Можеби и не треба роботите да личат на нас
Коњите се ефикасни на четири нозе, но автомобилите користат тркала. Целта на градењето роботи не треба да биде копија.
За време на дебатата во Everyday Robots за тоа дали роботите треба да имаат нозе или тркала, Винсент Дуро, менаџерски ветеран за инженерство, рече: „Ако јас можам да стигнам таму, тогаш и роботите исто така треба да го направат тоа“, мислејќи на неговата инвалидска количка.
Нозете на роботот се сложени, бавни и помалку ефикасни од тркалата. Фокусирањето на задачите од реалниот свет и поедноставувањето на дизајнот е поважно од имитирањето на човечки облик.